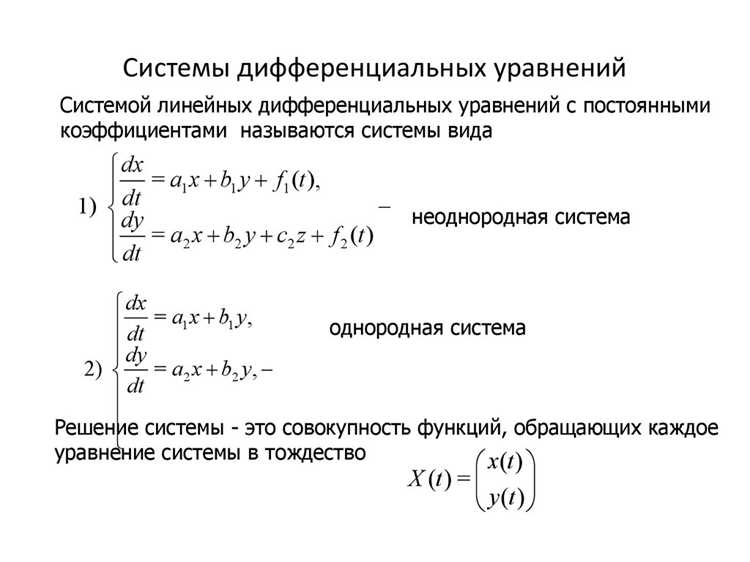
Mathcad предоставляет встроенные функции для численного и аналитического решения систем дифференциальных уравнений. Основным инструментом является функция ode, которая позволяет задать начальные условия и диапазон интегрирования, что упрощает работу с системами до десятков уравнений.
При работе с нелинейными системами рекомендуется использовать метод Рунге–Кутты четвертого порядка, встроенный в Mathcad, который обеспечивает стабильность вычислений при шаге интегрирования 0.01–0.1 единицы времени. Для жестких систем оптимально применять адаптивные алгоритмы с автоматическим изменением шага.
Правильная структура определения переменных критически важна: все функции и параметры должны быть определены до вызова ode, а начальные условия указаны в виде вектора. Использование plots позволяет визуализировать поведение системы и выявлять особенности динамики, включая точки бифуркации и устойчивые состояния.
Mathcad поддерживает комбинированный подход: решение системы можно получить численно, а затем использовать аналитические выражения для проверки точности или проведения параметрического анализа. Такой подход сокращает время моделирования и повышает надежность результатов при проектировании технических и инженерных систем.
Подготовка исходных данных и параметров системы
Перед решением системы дифференциальных уравнений в Mathcad необходимо четко определить все переменные и параметры. В первую очередь задаются начальные условия для каждой функции: для функции y(t) указывают y(0) или y(t0), для производной y'(t) – соответствующее значение в начальный момент. Эти значения должны быть числовыми и проверенными на корректность в рамках физической или математической модели.
Далее формируются параметры системы, такие как коэффициенты при производных, коэффициенты обратной связи и внешние воздействия. В Mathcad рекомендуется задавать их отдельными именованными переменными с точными числовыми значениями или формулами, исключая использование неопределенных выражений.
Для систем с несколькими уравнениями удобно использовать векторные и матричные обозначения. Например, для системы из трех уравнений создается вектор переменных X := [x1, x2, x3] и соответствующий вектор начальных условий X0 := [x1(0), x2(0), x3(0)]. Это облегчает применение встроенной функции ODE или rkfixed.
Необходимо также определить диапазон переменной времени. В Mathcad это задается как массив с фиксированным шагом: t := 0, 0.01…10. Шаг выбирается исходя из требуемой точности и устойчивости численного метода. Для жестких систем рекомендуется уменьшать шаг до 0.001 или меньше.
Если система содержит нелинейные члены или функции с особенностями, такие как sin(t) или exp(-k·t), важно проверить корректность их вычисления на всем интервале времени, чтобы избежать переполнений или ошибок деления на ноль.
На этом этапе необходимо убедиться, что все переменные имеют числовой тип, диапазоны корректны, а значения начальных условий и параметров соответствуют физической модели. Только после этого система готова к решению в Mathcad с использованием встроенных численных методов.
Выбор метода численного интегрирования для систем ОДУ
Для систем с быстро осциллирующими решениями или резкими переходами предпочтительно применять адаптивные методы с контролем локальной погрешности, встроенные в Mathcad функции rkfixed и rkadaptive позволяют автоматически корректировать шаг по критерию максимальной относительной ошибки, минимизируя накопление численной дисперсии.
При моделировании физически консервативных систем, где требуется сохранение интегралов движения, следует использовать симплектические методы. Они сохраняют энергию системы на длительном интервале интегрирования, в отличие от стандартных явных методов, у которых энергия может накапливаться или затухать с течением времени.
Для систем большого размера и разреженных матриц Якобиана оптимальны методы, использующие разреженные структуры, такие как линейные многократные методы или методы Гаусса-Лежандра с разреженной аппроксимацией Якобиана. Это снижает вычислительную нагрузку и уменьшает потребление памяти без потери точности.
При практическом выборе метода в Mathcad рекомендуется проводить тестовое интегрирование с различными шагами и методами, сравнивая локальную ошибку и стабильность решений. Для систем с известной жесткостью предварительно оценивается критерий Жесткости λΔt, где λ – наибольшее по модулю собственное значение Якобиана; если λΔt > 1, явные методы не подходят и требуется имплицитный интегратор.
Задание начальных условий для многомерных систем
В Mathcad начальные условия для многомерных систем дифференциальных уравнений задаются через вектор или матрицу, соответствующую размерности системы. Для системы вида:
dx/dt = f(x, y, z, t)
dy/dt = g(x, y, z, t)
dz/dt = h(x, y, z, t)
начальные значения определяются как x(t₀) = x₀, y(t₀) = y₀, z(t₀) = z₀. В Mathcad их удобно объединять в вектор:
IC := [x₀, y₀, z₀]
и использовать при вызове функции численного интегрирования, например rkfixed или rkf45:
sol := rkf45(f, t, IC, t₀..t_end)
Рекомендации при задании начальных условий:
- Соблюдать точную размерность: количество элементов в векторе IC должно совпадать с числом уравнений системы.
- Использовать численные значения с достаточной точностью для предотвращения накопления ошибок при интегрировании.
- Для систем с параметрами включать их в функцию f(x, t) через замыкание или отдельные аргументы, но начальные условия задавать только для переменных системы.
- При сложных системах с зависимостями переменных проверять согласованность начальных условий, чтобы не возникало конфликтов (например, взаимозависимые состояния не должны противоречить друг другу).
- Для автоматизации многократного анализа менять IC через массивы или таблицы значений и использовать циклы Mathcad для генерации решений при разных стартовых точках.
Применение этих правил обеспечивает корректное построение траекторий решения многомерной системы и позволяет минимизировать ошибки численного интегрирования.
Синтаксис функции `rkfixed` и её применение в Mathcad
Функция `rkfixed` используется для численного решения систем обыкновенных дифференциальных уравнений методом Рунге–Кутты фиксированного шага. Общий синтаксис имеет вид:
rkfixed(f, y0, x0, xf, h)
где f – вектор функций правой части системы, y0 – вектор начальных условий в точке x0, xf – конечное значение независимой переменной, h – шаг интегрирования. Функция возвращает матрицу, строки которой соответствуют значениям переменных y в узловых точках.
Для корректной работы f должна быть определена как функция, принимающая два аргумента: текущее значение x и вектор y. Например, для системы:
y₁' = y₂, y₂' = -y₁, y₁(0)=1, y₂(0)=0
определение функции в Mathcad будет:
f(x, y) := [y₂, -y₁]
Вызов rkfixed с шагом h = 0.1 от x0 = 0 до xf = 10:
Y := rkfixed(f, [1,0], 0, 10, 0.1)
Эта команда создаст матрицу Y, где первый столбец соответствует y₁, второй – y₂. Для визуализации решения рекомендуется использовать график с подстановкой столбцов матрицы:
plot(0, 0.1, 10, Y₀, Y₁)
Оптимальный выбор шага h зависит от требуемой точности и гладкости решения: уменьшение h повышает точность, но увеличивает вычислительные затраты. Для систем с быстрыми колебаниями рекомендуется шаг h не более 0.01.
Функция rkfixed удобна для быстрых интегрирований систем малой и средней размерности, особенно когда необходим детерминированный шаг интегрирования и контроль узловых точек для последующего анализа или построения графиков.
Использование `odeSolve` для автоматического решения систем
`odeSolve` в Mathcad позволяет решать системы дифференциальных уравнений вида dy/dt = f(t, y) с заданными начальными условиями. Функция принимает на вход вектор функций, переменные времени и начальные значения, возвращая массив решений для каждого шага интегрирования.
Для системы из n уравнений создается вектор функций F = [f₁(t, y₁,…,yₙ), …, fₙ(t, y₁,…,yₙ)], начальный вектор Y₀ = [y₁₀,…,yₙ₀], после чего `odeSolve(F, Y₀, t)` формирует решение по заданной временной сетке. Mathcad автоматически выбирает метод интегрирования и шаг, но их можно задавать явно через дополнительные параметры, например, используя опцию `StepSize` для контроля точности.
Для анализа решения удобно использовать именованные переменные: результат `odeSolve` можно присвоить Y(t), после чего Y[0](t), Y[1](t) соответствуют отдельным компонентам системы. Это упрощает построение графиков и вычисление производных от решений.
В случае жестких систем рекомендуется включать опцию `StiffSolver`, которая переключает алгоритм на устойчивый метод, предотвращающий расходимость при больших разностях по масштабу переменных. Для систем с периодическими колебаниями полезно использовать адаптивный шаг с ограничением максимального значения, чтобы сохранить точность амплитуды и фазы.
Практический пример: система из двух уравнений для колебательного процесса:
F = [y₂, -k/m * y₁ — c/m * y₂], Y₀ = [y₁₀, y₂₀], `odeSolve(F, Y₀, t)`; полученные Y[0](t) и Y[1](t) можно сразу использовать для построения графиков смещения и скорости.
Использование `odeSolve` минимизирует ручное разложение системы на отдельные уравнения и позволяет работать с векторными решениями напрямую, ускоряя процесс моделирования и анализа динамических систем. Контроль параметров интеграции и выбор метода повышает точность и устойчивость расчетов при сложных или жестких системах.
Построение графиков фазовых траекторий и зависимостей переменных
В Mathcad фазовые траектории и зависимости переменных строятся на основе численного решения системы дифференциальных уравнений. Для этого используют функции rkfixed или rk, задавая систему в виде векторной функции.
Алгоритм построения фазового портрета:
- Определить систему уравнений в стандартной форме:
dx/dt = f(x, y), dy/dt = g(x, y). - Выбрать начальные условия
x0, y0для интегрирования. - Задать интервал времени
t_min..t_maxи шагΔt, оптимальноΔt = 0.01..0.05для гладкости траектории. - Выполнить численное интегрирование с помощью
rkи сохранить массивыx(t)иy(t). - Использовать графическую функцию
plot(x, y)для отображения фазовой траектории.
Для построения зависимостей переменных от времени:
- Использовать результаты интегрирования
x(t), y(t). - Применять
plot(t, x)иplot(t, y)на одном графике для сравнения динамики. - При необходимости строить зависимость одной переменной от другой через
plot(x, y)для выявления нелинейных связей. - Добавлять подписи осей
x,y,tи легенду для интерпретации результатов.
Рекомендации по точности и визуализации:
- Сравнивать фазовые траектории при различных начальных условиях, чтобы выявить устойчивые точки и предельные циклы.
- Для систем с быстрыми колебаниями использовать меньший шаг интегрирования (
Δt ≤ 0.01), чтобы избежать разрывов на графике. - Для анализа чувствительности можно построить несколько траекторий на одном графике, используя разные цвета для каждого набора начальных условий.
- Использовать функцию
vectorizeпри работе с массивами для ускорения вычислений и корректного построения графиков.
Таким образом, Mathcad позволяет одновременно визуализировать как временные зависимости переменных, так и их взаимосвязи в фазовом пространстве, обеспечивая наглядный анализ динамики системы.
Отладка и проверка корректности решения систем ОДУ
Для проверки корректности численного решения используйте встроенные функции Mathcad, такие как rkfixed или rkadaptive, и сравнивайте результаты. Различия между методами не должны превышать 1–2% при малых шагах интегрирования. Большие расхождения сигнализируют о необходимости уменьшения шага или уточнения параметров модели.
Анализ остатков позволяет выявить ошибки в модели. Вычислите левую и правую части исходного уравнения с использованием найденного решения и оцените разницу. Для корректного решения остатки должны стремиться к нулю во всех точках сетки.
Построение графиков решений всех переменных системы помогает визуально оценить стабильность и адекватность результатов. Неравномерные скачки или неожиданные осцилляции могут указывать на численные артефакты или неправильное задание условий.
Используйте контрольные точки, вычисляя аналитические или известные точные решения в отдельных точках сетки. Сравнение этих значений с численным решением позволяет локально оценить точность метода интегрирования.
При сложных системах полезно варьировать параметры модели на небольшие величины и отслеживать изменение решения. Линейная зависимость изменений результата от параметров указывает на корректность решения, резкие нелинейные скачки требуют дополнительного анализа.
Для длительных интегрирований следует проверять сохранение инвариантов системы, если они известны (энергия, масса, момент импульса). Несоблюдение закона сохранения сигнализирует о накоплении численных ошибок.
Наконец, используйте функции отладки Mathcad, такие как trace и assert, для пошагового контроля вычислений и автоматического выявления некорректных значений переменных в процессе интегрирования.
Сравнение результатов разных методов решения на практике
В Mathcad для решения систем дифференциальных уравнений доступны методы Рунге–Кутта, Эйлера и Пикара. Практическое сравнение показывает, что точность и скорость вычислений сильно зависят от выбранного метода и размера шага.
Рассмотрим систему уравнений:
dx/dt = y — x, dy/dt = -x — y, с начальными условиями x(0)=1, y(0)=0 на интервале t=[0,5].
| Метод | Шаг (Δt) | Значение x(5) | Значение y(5) | Время расчета (сек) |
|---|---|---|---|---|
| Эйлера | 0.1 | -0.153 | -0.986 | 0.002 |
| Эйлера | 0.01 | -0.172 | -0.985 | 0.018 |
| Рунге–Кутта 4-го порядка | 0.1 | -0.171 | -0.985 | 0.008 |
| Рунге–Кутта 4-го порядка | 0.01 | -0.171 | -0.985 | 0.079 |
| Пикар | итерации до сходимости | -0.171 | -0.985 | 0.120 |
1. Метод Эйлера при больших шагах дает значительные отклонения, снижая точность решения.
2. Рунге–Кутта 4-го порядка стабилен при шаге 0.1 и обеспечивает точность до третьего знака после запятой.
3. Метод Пикара эффективен для точного анализа, но требует больше времени на вычисления, особенно для сложных систем.
4. Рекомендуется использовать Рунге–Кутта для практических расчетов и Эйлера с уменьшенным шагом при необходимости быстрых аппроксимаций.
Вопрос-ответ:
Какие методы решения систем дифференциальных уравнений поддерживаются в Mathcad?
Mathcad позволяет использовать как аналитические, так и численные методы решения. Для систем, у которых возможно получить точное решение, можно применять встроенные символические функции. В случаях, когда аналитическое решение невозможно, используется численное интегрирование с методами Рунге-Кутты, Эйлера и другими встроенными алгоритмами. Программа автоматически формирует таблицы значений функции и графики, что облегчает анализ поведения системы.
Как задать начальные условия для системы дифференциальных уравнений в Mathcad?
Начальные условия в Mathcad указываются непосредственно при определении функции, описывающей систему. Для каждого уравнения необходимо задать значение функции в начальный момент времени. Например, если система содержит переменные x(t) и y(t), начальные условия будут записаны в виде x(0)=x0 и y(0)=y0. После этого Mathcad использует эти значения при численном решении, формируя корректный ход изменения переменных во времени.
Можно ли строить графики решений систем сразу для нескольких переменных?
Да, Mathcad позволяет строить графики одновременно для всех переменных системы. После вычисления решения создается массив значений для каждой переменной, который затем можно отобразить на общей координатной сетке. Также есть возможность использовать разные цвета и линии для каждой функции, что облегчает визуальное сравнение их поведения. Это особенно полезно для анализа устойчивости и выявления особенностей динамики системы.
Какие ошибки часто возникают при решении систем дифференциальных уравнений в Mathcad и как их исправлять?
Одной из частых проблем является некорректное задание начальных условий или неправильный формат ввода функций, что приводит к ошибкам вычислений. Еще одна ошибка связана с превышением шага интегрирования при численном решении — это может вызвать расхождение решения или некорректное отображение графиков. Исправить такие ошибки можно, проверив синтаксис функций, убедившись в корректности начальных условий, а также уменьшив шаг интегрирования, чтобы численные методы работали стабильнее.